编者按:机器人科创教育从竞赛走向普惠,基础教育生态也悄然发生改变。近日,记者专访广东省科技教育名师何斌,展现其如何通过课程重构与资源普惠,培养学生的创新思维与实践能力,为新时代科创教育提供可复制的实践经验。
何斌
广东省中小学智慧教育名师团主持人、省科技教育名师工作室主持人、省“粤派名师”教育数字化工作坊主持人,珠海市名教师工作室主持人、市信息化“双师”工作坊主持人,华南师范大学教育硕士专业学位校外导师。世界机器人大赛总决赛裁判长,全国师生信息素养提升实践活动专家评委,粤港澳学生信息科技创新大赛裁判长。粤教版普通高中信息技术教科书《选择性必修2:网络基础》分册主编、中央电化教育馆《人工智能(高中版)》编委、《机器人科创教育丛书》主编。

记者:当前机器人科创教育在中小学校的普及程度如何?您认为它对培养学生的哪些能力最有价值?
何斌:
作为一名在信息科技课堂深耕19年的教师,我深切感受到机器人科创教育正悄然改变着基础教育生态。从国家示范性高中到乡镇中心小学,机器人科创教育正以校本课程、社团活动、项目式学习等多元形态落地生根。这不仅体现在设备更新上,更反映在学生们眼中跃动的创造火花——当学生用舵机组装机械臂解决现实问题时,他们收获的是跨学科思维与工程实践能力的真实生长。
结合多年的一线教学实践,我认为机器人科创教育的核心价值在于实现知识技能习得与高阶思维发展的有机融合。当学生设计机器人巡线方案时,他们不仅需要运用坐标系转换的数学知识(技能层),更要构建从传感器数据采集到执行器动态调整的系统思维(认知层)。在调试机械臂抓取角度时,基础编程语句的掌握只是起点,真正重要的是通过“假设—验证—迭代”的循环,培养元认知能力——这种既能拆解技术细节又能统整系统架构的双重视角,正是未来社会所需的核心竞争力。
18年前那个用易拉罐制作简易机器人的学生,如今已成为大学人工智能专业的副教授。正是这样的教育反馈,让我坚定深耕机器人科创教育。当看到学生们调试机械臂时,从反复修改参数的焦躁到建立系统变量认知的顿悟,我确信这项教育正在锻造未来创新者的底层思维模式。
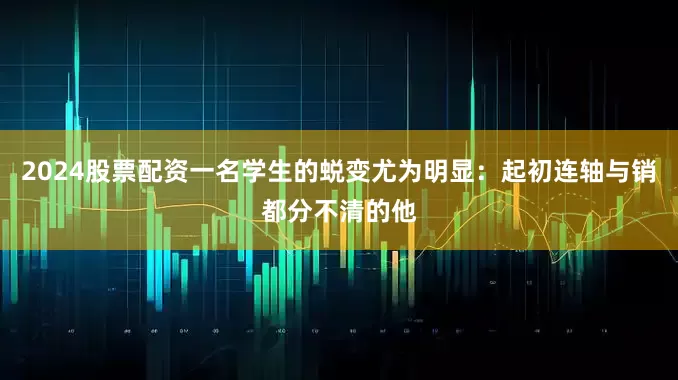
学生调试机器人装置
记者:从机器人竞赛到机器人科普,这个转变是怎么发生的?可以谈谈您的心路历程吗?
何斌:
从机器人竞赛转向科普教育,这—转变源于两个触动灵魂的教育现场。
第一个转折点发生在与一位学生的对话中。这个腼腆的孩子经常站在实验室门口看我指导学生备赛,某天终于鼓起勇气说:“老师,我们班很多同学没学过机器人的知识,但我们对它的向往不比竞赛队的同学少……您能给我们开堂课吗?”他摩挲着校服口袋里用橡皮筋和雪糕棍自制的“机械手”模型,眼睛里跳动着渴望的光——那一刻,我意识到金牌的光芒再耀眼,也照不进那些连基础工具包都触不到的角落。这让我重新审视教育的本质:科技创新不应是少数人的竞技场,而该成为所有青少年触手可及的成长阶梯。
第二个启示来自一场我执裁的机器人比赛。决赛设置了“神秘任务”,要求选手现场改造机械结构,结果90%的队伍因无法自主调整传感器参数而崩溃。我调查发现,多数参赛机器人的核心模块由教师代工,学生甚至说不清舵机扭矩与臂长的函数关系。最讽刺的是,某获奖队员在答辩时坦言:“我只练过老师给的方案。”这种代劳式备赛暴露出功利化教育的致命伤:当教育沦为奖杯生产线,学生失去的不仅是动手能力,更是面对真实问题的勇气与创造力。
正是这两段经历让我彻底转变教育路径。竞赛培养的终究是解题高手,而科普教育孕育的才是未来问题的定义者。
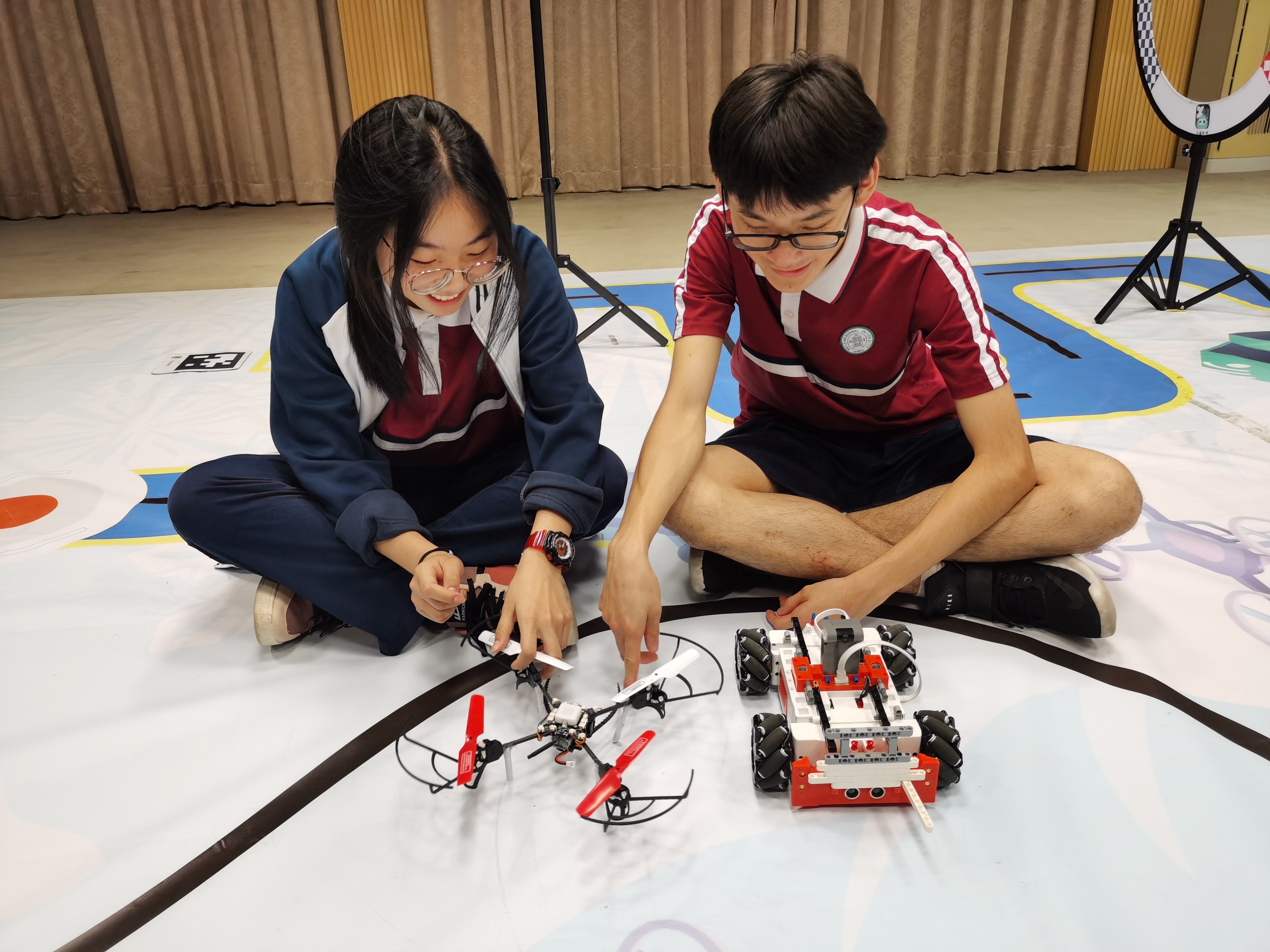
何斌指导学生
记者:您指导了哪些具有代表性的机器人科普活动?在这个过程中扮演了什么角色,以及学生通过该活动收获了怎样的成长?
何斌:
为了让更多的学生可以学习到机器人的知识与技能,我在学校开设了“简易机器人制作”校本课程,涵盖了齿轮传动、超声波避障等16个梯度化项目,构建了“机械结构认知—传感器融合—智能控制进阶”三阶学习体系。作为课程创始人,我承担了两大角色:一是课程架构师,将大学机器人专业课解构为可适配高中生的模块化学习案例;二是跨学科整合者,例如在皮带传动项目中融入三角函数计算齿轮比,在蓝牙遥控环节引入通信协议解析等。
在课程实施中,一名学生的蜕变尤为明显:起初连轴与销都分不清的他,学习完课程后竟能融合空中巴士的悬挂系统和龙门吊的轨道设计,搭建出具备三自由度机械臂的物流分拣机器人。这个作品精准实现了货物重量分级与路径规划,最终斩获全国学生信息素养提升实践之2021—2022年央馆-乐高教育科创活动FLL青少年机器人挑战赛季军。
该课程实施了两年,我总结提炼出“三链融合”模式:知识链(机械原理与算法逻辑交织)、能力链(工程思维向创新素养跃迁)、资源链(工作室研修与课程资源共建)。借此东风,我申报了广东省教育研究院第二批STEM教育专项研究重点课题“基于STEM的机器人校本课程开发研究”,为日后构建可复制的课程开发框架和教学模式奠定了基础。

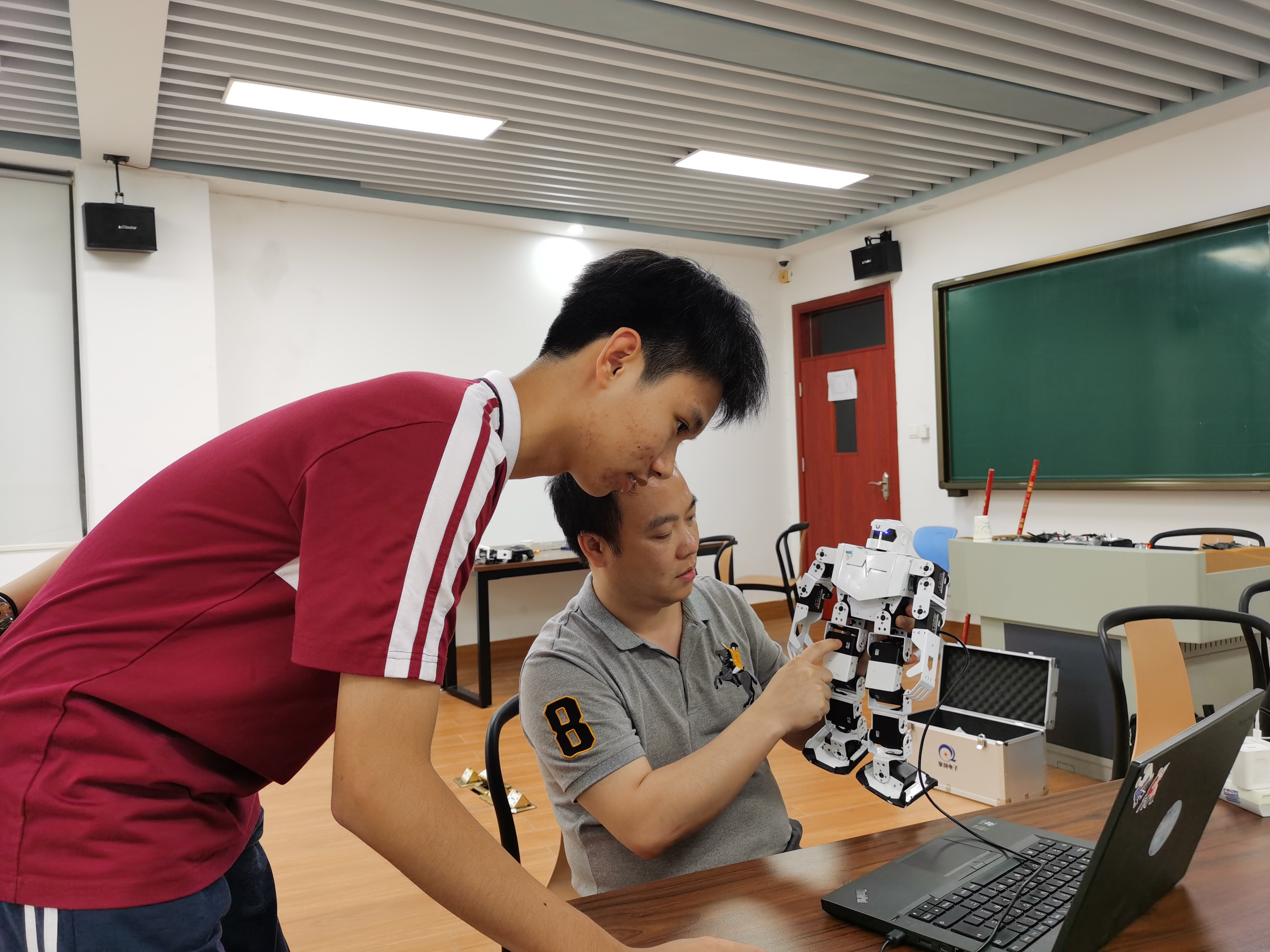
基于STEM开发研究机器人校本课程
记者:《机器人科创教育丛书》是如何诞生的?请谈谈它的创作起源、经过和成果。
何斌:
《机器人科创教育丛书》的诞生源于我想在校本课程的基础上,设计出一套无论小学、初中乃至高中的学生,都能从最适合自己的起点开始学习并逐步深入探索的课程。学生创新思维与价值观的培育,不能依靠零散的知识拼图,而需要构建环环相扣的课程链条体系:机械原理—传动机制—感知技术—控制论基础—自动化。
基于这样的认知,我带领团队历时三年打磨出一套五阶成长课程:从《创意机器人》的机械启蒙,到《动力机器人》的传动探究,进阶至《智能机器人》的传感融合,再通过《零基础学机器人编程》架起逻辑桥梁,最终在《编程挑战机器人》中实现自主创新——如同搭建认知阶梯,让每个学生都能拾级而上。
该丛书由广东教育出版社出版,提出了“科创一体、融合创新”的教学理念。“科创一体”是指推动科学原理探究与创客实践创新的深度融合,以真实问题为纽带整合跨学科知识;“融合创新”则以“一核双融六环节”教学模式为载体,构建“以学生为中心—知识技能与高阶思维双重融合—六环节推进”的教学框架,通过“问、搭、学、比、创、享”的递进式学习,系统性提升学生的工程思维与创新能力。该成果在2024年分别获得广东省中小学教育创新成果奖三等奖和珠海市教育教学成果奖(基础教育)二等奖。
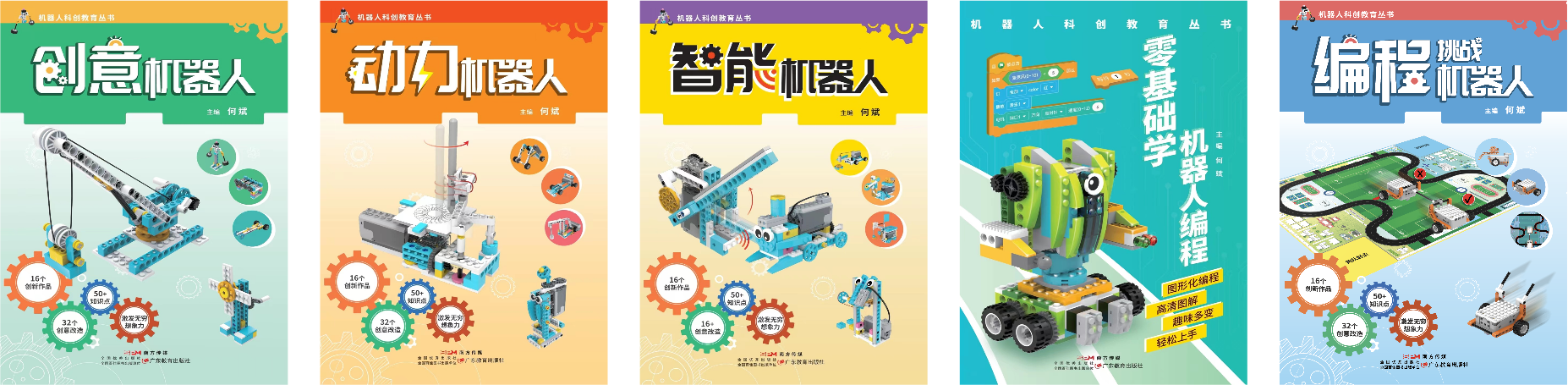
《机器人科创教育丛书》
记者:随着AI技术的发展,机器人科创教育有哪些变革趋势?如何平衡技术工具的使用与教育本质的关系,避免“重设备、轻思维”的问题?
何斌:
人工智能技术正以革命性态势重塑机器人科创教育生态,我认为其发展趋势可概括为“三维重构”:
一维重构教学内容体系。编程教学正经历从图形化向文本语言的范式迁移,Python与C++逐渐成为主流载体;机器学习、计算机视觉等AI算法模块深度嵌入课程,如学生在智能分拣项目中需自主训练YOLO模型实现目标检测。
二维重构教学实践场域。基于数字孪生技术构建“虚拟预演—实体验证”双循环模式:使用CoppeliaSim完成六足机器人步态仿真后,再通过3D打印实体调试,使复杂系统开发周期缩短40%。
三维重构知识网络拓扑。打破学科壁垒构建动态知识图谱,如机械臂控制项目需同步运用刚体运动学原理、概率统计建模及PID控制算法,实现多学科知识的有机融合。
平衡技术与教育本质,我认为要坚持三重底线:首先,以问题解决能力为评价核心,如果学生用旧手机主板+红外传感器制作盲人导航仪,理应与高端方案同等评分,因为我的考查点是学生拆解与创新适配能力,而不是作品的质量和精度。其次,为技术工具设置防火墙,要求所有AI生成的设计必须附带手绘迭代草图,对比分析三版机械臂方案的优劣,防止技术代劳削弱原创力。最后,坚守实践认知不可替代,每周保留实体搭建课——学生调试舵机时发现理论计算的90度转角实际存在5~8度偏差,这种触觉反馈带来的工程直觉是虚拟仿真无法培育的。正如学生用微波雷达替代激光雷达实现低成本避障所证实的:教育不是追逐技术参数,而是培养用有限资源创造性解决问题的内核。

积极普及机器人科创教育
记者:接下来,您会如何进一步推动机器人科创教育的普及?
何斌:
接下来,我将从课程重构、成果推广、名师辐射三大维度推进机器人科创教育普及。
在课程重构方面,构建“原理—实践”双向渗透的立体课程。我计划开发“机器人工程思维”系列课程,通过“问题溯源—数学建模—物理验证—工程实现”四步法串联跨学科知识。例如在机械臂项目中,学生须先推导运动学方程,再用国产开源硬件验证关节扭矩,最终通过Python实现视觉抓取算法。
在成果推广方面,构建“需求—供给”的普惠共享资源平台。我希望依托已申报的广东省2024、2025年基层科普行动计划立项项目,实施“百校千课”普惠计划,向粤东西北的薄弱学校捐赠机器人套件、《机器人科创教育丛书》及其课程资源包,让更多的学生有机会学习到机器人的知识与技能。
在名师辐射方面,构建“枢纽一节点”协同联动的区域教研共同体。我打算联合佛山、东莞等市级名师工作室实施“2+1+N”种子教师培育工程:通过2天沉浸式研修掌握“一核双融六环节”教学范式(理论奠基),1个月双师课堂实操跟岗(技能迁移),N轮线上工作坊形成成长闭环(持续发展),构建“名师示范—骨干引领—新手成长”的三级辐射体系。
未来,我会通过行动持续推动机器人科创教育的普及,为培养更多具备创新精神和实践能力的未来人才贡献自己的力量。
(来源:《成长》杂志2025年8期)
宝尚配资-宝尚配资官网-口碑最好的配资平台-配资排行提示:文章来自网络,不代表本站观点。
- 上一篇:配资炒股哪个平台正规曼联正优先考虑引进一名前锋
- 下一篇:没有了






